name
400 827 2720


EPSON机器人
EPSON机器人|爱普生机器人,Scara/6轴/控制器

工控类产品
松下传感器,雅科贝思直线电机,SMC气动,利茗减速机,高创传动
EPSON机器人|爱普生机器人,Scara/6轴/控制器
松下传感器,雅科贝思直线电机,SMC气动,利茗减速机,高创传动

配备双端口Ethernet。
超小型PLC「FP0H」、可以实现信息化・分散控制!
 |
CE 已取得。
<h2 class="HeadingB1" "="" style="margin: 0px 0px 10px; padding: 6px 10px 5px; font-size: 12px; outline: none; box-sizing: border-box; color: rgb(51, 51, 51); font-weight: normal; text-wrap-mode: wrap; background-image: url(""); background-position: initial; background-size: initial; background-repeat: initial; background-attachment: initial; background-origin: initial; background-clip: initial; line-height: 19.2px; font-family: arial, "Hiragino Sans GB", "Microsoft Yahei", sans-serif;">特点
高速运转处理 [速度是以往机型的8倍!]基本命令:10ns~ (10k步以内) 高容量最大 64k步 [从以往机型的2倍!]程序容量:64k/40k/32k/24k 步可调 数据容量:12k/24k/32k/64k 可调 |  |
| I/O: | 输入16点、输出点16 晶体管输出(NPN / PNP) |
|---|---|
| 内置I/F: | Ethernet×2端口、RS232C×1ch、USB×1ch |
| 扩展I/F: | FP0H / FPΣ扩展总线×1、FP0R扩展总线×1 插卡槽×1(RS232C、RS232C×2、RS485、RS232C+RS485) |
| 工具软件: | FPWIN GR7 |
| 内置4轴脉冲输出内置4轴脉冲输出,因此可实现2组2轴直线查补动作的同时控制。例如,还可对两台xy平台进行控制 |
与梯形图程序相组合,利用高速计数器输入来检测编码器发出的脉 冲信号,因此可用于以下案例:通过调整脉冲输出的频率,从而使 主轴从轴的速度实现同步
如上图所示,利用编码器脉冲的计数来检测变频器所控制的传送带 1的速度,将与该速度相符的脉冲输出(JOG运行)至马达(从 轴),使传送带2的速度实现同步。 | 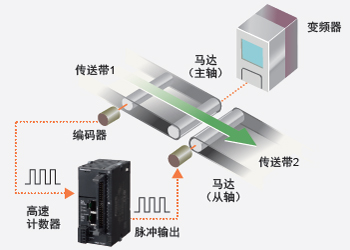 |
FP0H中还可将脉冲输出端口用作PWM输出端口
应用案例:还可用作模拟电压输出,对变频器的速度进行控制等。
※:对应EtherNet/IP
| 对应EtherNet/IP带Ethernet型控制单元对应EtherNet/IP 。可简单连接各种机械手、PLC,进行控制和通信。 (注):EtherNet/IP是ODVA的商标。 |
| 利用插卡方式,削减单元成本和安装空间。能以较低的成本在控制单元上简单扩展串行通信功能。 |
(使用可编程智能操作面板时)
※:仅限带 Ethernet 型。
| 简单·同时执行多个记录可通过配置画面来对记录进行设定。另外,最多可同时执行4个文件。 |
| 分享数据容量,弥补容量不足。 无需再重新购买高昂的更高等级型号。 |
| 可使用SD存储卡来更新程序可将程序保存到SD存储卡内,并进行读取。 可经由SD存储卡简单更新程序。※:仅限带 Ethernet 型。 |
| 位置控制的设定对位置控制平台(注1)以及各轴参数(注2)进行设定。(注1)::位置控制平台是指移动量、目标速度、加·减速时间、运行模式等各个位置控制动作的信息。(注2):各轴参数是指JOG运行以及原点复位的运行条件,限位输入逻辑、停止时的减速时间等。 |
最适用于以下应用案例:电子部品的堆垛等,高速重复执行短行程动作。
位置控制运行时,对编码器等的反馈脉冲进行计数,从而可对驱动方面的异常情 况等意外事故进行检测
| 位置控制运行时,对编码器等的反馈脉冲进行计数,从而可对驱动方面的异常情 况等意外事故进行检测。 |
利用高速启动,重复控制,还可用于恒定进给加工用途
| 启动位置控制专用设定工具软件 Configrator PM ,简单设定参数, 即可完成位置控制的动作设定。 还支持试运行,即使控制单元处于程序模式,也可对位置控制动作进行确认。 |
高度90mm的超小型尺寸。有助于装置实现小型化。
利用Control FPWIN GR/GR7编写的FPΣ用梯形图程序可转换为FP0H用。
将FPΣ替换为FP0H时,无需重新编写梯形图程序。
(注):使用不支持的对象指令(F176 SPCH:圆弧插补)时,请先替换相关指令,然后再转换机型。
苏州镒升机器人科技有限公司(总部)
地 址:江苏省苏州市高新区华山路158号39A
电 话:0512-66905562
传 真:0512-66901297
邮 箱:mandy@esunrobot.com
华东热线:400-827-2720
全天热线:18015501787
网址:http://www.esunrobot.com
深圳市优源康智能科技有限公司 (深圳)
地 址:深圳市宝安区航城街道鹤洲社区洲石路739号恒丰工业城C4栋803
电 话:0755-23769849
深圳热线:18015501787
全天热线:18015501787
传 真:0512-66901297 邮 箱:liuxiong@yykzn.com
(周一至周五 7:30-21:30)
(周末及节假日09:00-18:00)
18015501787 订阅官方微信
了解最新资讯
订阅官方微信
了解最新资讯
©2018-2038 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络
![]() 苏公网安备32050502012340号
苏公网安备32050502012340号
(周一至周五 8:30-18:00)
周末及节假日请联系18015501787
 订阅官方微信 了解最新资讯
订阅官方微信 了解最新资讯
©2018 苏州镒升机器人科技有限公司 版权所有苏ICP备19012241号-1技术支持:万度网络